

پژوهشگر و نویسنده: دکتر ( افشین رشید )

موتور پلهای را میتوان جز گروه سیستم های بدون جاروبک به حساب آورد. کاربرد اصلی این نوع موتور در سیستم تثبیت و سیستم تنظیم موقعیت حلقهباز است. موتورهای پلهای از نوع AC هستند و فرمان ورودی به شکل پالسهای الکتریکی است.
موتور های DC زغالی زمانی که ولتاژ به ترمینال های آنها تزریق میگردد به نرمی حرکت میکنند. استپ موتور به وسیله قابلیت تبدیل پالس های ورودی به فواصل کوچک مشخص در موقعیت شفت شناخته میشوند. هر پالس شفت را به یک زاویه مشخص میبرد. استپ موتورها اساساً دارای دندانههای مغناطیسی در اطراف یک شفت مرکزی از جنس آهن میباشند. الکترومغناطیس ها به وسیله یک مدار راه انداز خارجی یا یک میکروکنترلر تغذیه میگردند.

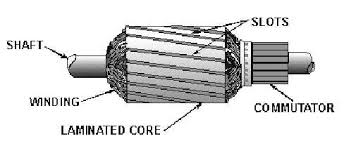
ساختمان داخلی و ساختار stepper motor
این موتورعموما دارای چهار قطب میباشد که سیم پیچها بر روی این چهار قطب قرار می گیرند و شما با ارسال بیتهای 0و1به این سیم پیچها در واقع میدان مغناطیسی ایجاد می کنید که این میدان باعث حرکت روتور مغناطیسی موجود در داخل موتور پله ای می شود البته میبایست این سیم پیچها را به توالی 0 و 1 کرد و گرنه موتو ر مطابق میل شما نخواهد چرخید یکی از مشخصه های این موتور زاویه حرکت آن می باشد و هر موتوری زاویه حرکتی مخصوص به خودش را دارد مثلا اگر موتوری زاویه حرکتش 7درجه باشد این موتور در هر بار ی که سیم پیچهایش حاوی ولتاژ می شوند 7 درجه در سمت حرکت عقربه های ساعت یا خلاف جهت آن بسته به اینکه سیم پیچها با چه ترتیبی ولتاژ دار می شوند خو اهد چرخید این 7 درجه چرخش برای این موتور پله ای نمونه یک پله یا یک step محسوب می شود.
با این تعریف متوجه شدید که یک موتور پله ای در یک دور کامل ممکن است.،100تا 200 پله کمتر یا بیشتر بسته به نوع موتور خواهد داشت.شما حتی می توانید یک موتور پله ای را به صورت نیم پله یعنی با نصف زاویه حرکت راه اندازی کنید این موتورها به صورت میکرو پله نیز حرکت می کنند در واقع منظور حرکت خیلی ریز ودقیق است. وقتیکه شما یک موتور پله ای را از نزدیک می بینید متوجه تعدادی سیم رنگی می شوید که از موتور پله ای بیرون آمده در واقع این سیم ها هر کدام به سر یک سیم پیج متصل هستند و یک سیم بین تمام سیم ها مشترک است .

موتورهای پله ای به دو دسته کلی تقسیم می شوند
۱- موتورهای تک قطبی
متعارفترین موتورهای پله ای تک قطبی چهار استاتور سیم پیچ دارند که دو به دو باهم زوج هستند و بر طبق شکل زیر (lead-5)دارای یک سر وسط مشترک میباشند. در این موتورها از سیم پیچ ها در یک جهت جریان کشیده می شود و به همین جهت به موتور پله ای چهار فاز یا تک قطبی معروف هستند.شفت موتور پله ای یک حرکت تکرار پذیر یا پله ای دارد که امکان حرکت آن به یک مکان دقیق را فراهم می کند.این موتورها دارای پنج یا شش سیم برای اتصال هستند و معمولأ با ۳٫۶ در هر گام ( ۱۰۰ گام در یک چرخ کامل) و یا ۷٫۵در هر گام ( ۴۸ گام در یک چرخ کامل) ساخته می شوند.
اگر موتور پله ای پنج سیمه باشد، یکی از آنها سیم مشترک است که به مثبت منبع تغذیه متصل می شود و چهار سیم دیگر به فازهای موتور متصل می شوند.برخی انواع موتورهای پله ای شش سیمه هستند. این موتورها دارای دو مجموعه سیم پیچ هستند و معمولأ در پرینترها استفاده می شوند.جابه جایی موتور پله ای از یک نقطه به نقطه دیگر باعث حرکت دورانی آن می شود. تعداد جابه جایی هایی که برای انجام یک چرخش کامل انجام می شود با تعداد گام های آن برابر است و از ویژگی های اختصاصی هر موتور پله ای می باشد. معمولأ موتورها با تعداد گام ها و یا درجه ی هر گام توصیف می شوند. تعدادی سیم پیچ در بدنه این موتورها تعبیه شده است که جابجایی دقیق موتور از یک نقطه به نقطه دیگر را ممکن می سازد.این سیم پیچ ها در استاتور یا بدنه موتور قرار گرفته اند.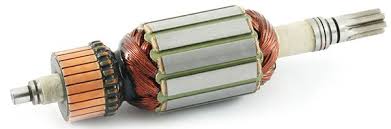
۲- موتورهای دو قطبی
در این موتورها هر سیم پیچ در دو جهت برق دار می شود و هر کدام از سیم پیچ ها می تواند پلاریته مربوط به خود را داشته باشد. این موتورها یک سیمه نیز نامیده می شوند زیرا هر قطب یک سیم پیچ دارد. موتورهای پله ای دو قطبی چهار سیم پیچ دارند و هر جفت از آنها برای یک سیم پیچ در نظر گرفته شده است. هر سیم پیچ در یک موتور پله ای دو قطبی به یک منبع تغذیه معکوس شونده مانند درایور H-bridge نیاز دارد. از آنجاییکه موتورهای دو قطبی قوی تر از انواع تک قطبی هستند، در طراحی هایی که فضا محدودتر است مورد استفاده قرار می گیرند. یکی از کاربردهای این موتورها استفاده در فلاپی درایورهای کامپیوتر است.
پژوهشگر و نویسنده: دکتر ( افشین رشید )